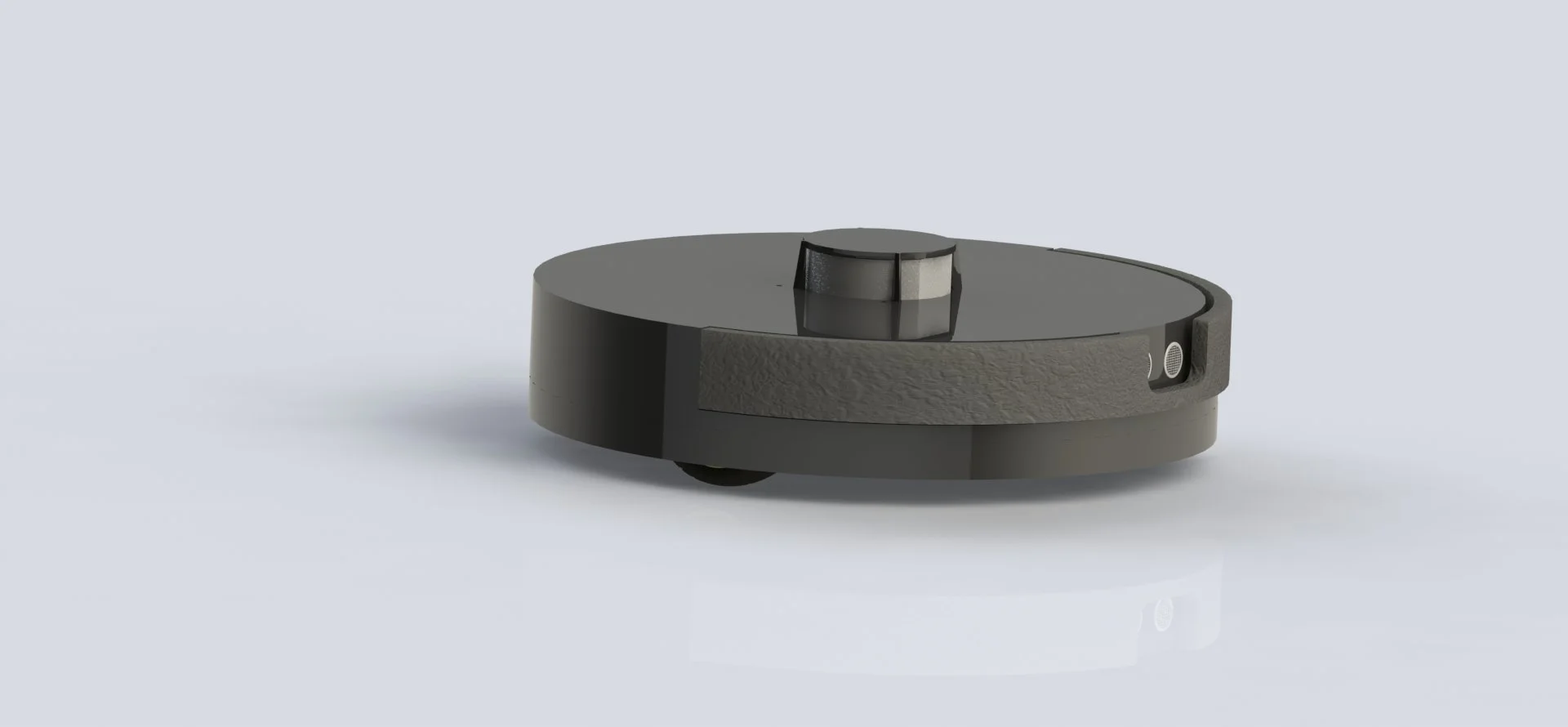
Robot Vacuum Cleaner
A Prototype designed and made as part of my engineering studies. This prototype serves as a proof of concept for Robot Navigation applied to a Robot Vacuum Cleaner as a new product for a fictional firm.
Year
2023

Task: Robot Navigation
Robot Vacuum Cleaners are a very handy everyday helpers in a modern home, and a technological marvel. It uses Robot Navigation technology to transform computer commands to movements in 3 dimensional space. This is the core issues that this project needed to solve, and can be divided into a few smaller problems. The problems are, How to know where we are, How to know where to go next, and How to understand the surrounding environment. This serves as a good demonstration of the advantage of Mechatronics, where, standing in between software and mechanics, we can use their techniques to solve a more complex problem.
For this project, we used a combination of :
Electronics design, mainly for making a central processor for the robot, and for communicating and controlling the motors and sensors on the robot.
Mechanical design, for motor housing and suspension, and understanding the 3D space the robot is in.
Software, to make sure the electronics are working to understand the space, working out where to go next, and to know where the robot is.
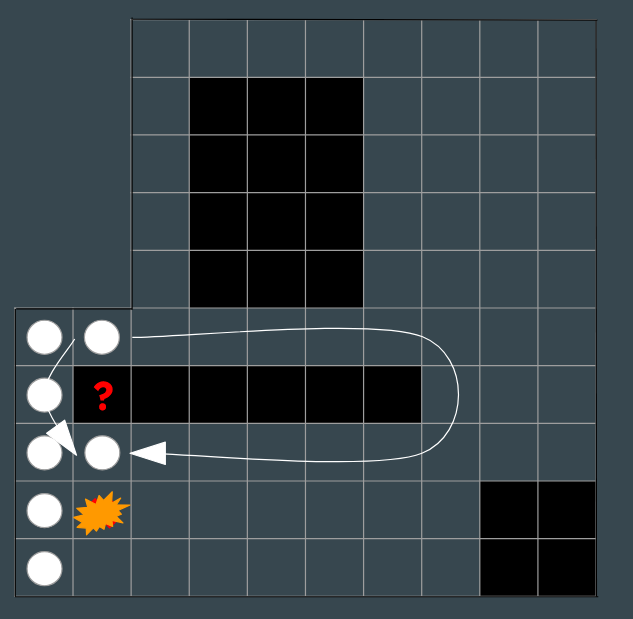
This project was done as part of my university education and as a group project. The end goal of this project is to demonstrate a prototype that can navigate a set environment to simulate vacuum cleaning a room.

Process: Modularization
The philosophy of this design is modularization, to make modules that do different tasks in the Robot. Modularization as a design philosophy will also help with the maintenance and extending the life cycle of the Robot, by making it easier to upgrade and modify the design. The prototype is divided into 4 main modules. The LIDAR module, the Motor modules, the Core Stack, and the Body. We came to this division after considering the need for the motors and their housings to be separate from the body of the robot. The LIDAR module uses the sensor to provide mapping data for the robot, and it communicates with the core stack, so the Robot can work out it’s surroundings. The Core stack has most of the electronics and acts as the hear and brain of the robot, it contains 2 ESP-32 processors, a voltage converter, and a H-bridge motor controller and other supporting electronic components, so the Robot could process it’s data, and command the motors to take it to the place it needs to be next. The motors provides the movements part of the robot, and it also has a suspension system to lower the likelihood of the lost of grip and movement control. The body contains the holds all the parts together, made of plastic and it protects the other modules from the elements. These all can be changed for parts with different capabilities in the future, to allow for iterative upgrades ( More powerful motors), new features (Internet conectivity), or new parts entirely as long as they fit within the modules.
Results and Conclusion
This project was a good learning moment for me, both in project planning and designing a robot. There were many challenges in this project, and some of them went unsolved by the end of the project, mainly due to both the limited time we had as well as the limited budget we had limited the types of sensors we could use. This meant that we were not able to deliver all the requirements of the project, and were only able to demonstrate a prototype that will require more development to achieve the goal of this project, which is to demonstrate a Robot Navigation system. This project showed me the importance with proper planning, realistic estimation with how long things can take to accomplish, and where the limits of our own abilities lie. In the end, we were only able demonstrate part of the robot, with it being able to move in a predetermined circuit, and map it’s surroundings, but without being able to navigate it’s surroundings properly.